Up To Date Digital Filters Design MCQs ( Digital Signal Processing ) MCQs – Digital Signal Processing MCQs

Latest Digital Signal Processing MCQs
By practicing these MCQs of Digital Filters Design MCQs ( Digital Signal Processing ) MCQs – Latest Competitive MCQs , an individual for exams performs better than before. This post comprising of objective questions and answers related to “Digital Filters Design MCQs ( Digital Signal Processing ) Mcqs “. As wise people believe “Perfect Practice make a Man Perfect”. It is therefore practice these mcqs of Digital Signal Processing to approach the success. Tab this page to check “Digital Filters Design MCQs ( Digital Signal Processing )” for the preparation of competitive mcqs, FPSC mcqs, PPSC mcqs, SPSC mcqs, KPPSC mcqs, AJKPSC mcqs, BPSC mcqs, NTS mcqs, PTS mcqs, OTS mcqs, Atomic Energy mcqs, Pak Army mcqs, Pak Navy mcqs, CTS mcqs, ETEA mcqs and others.
Digital Filters Design MCQs ( Digital Signal Processing ) MCQs – Digital Signal Processing MCQs
The most occurred mcqs of Digital Filters Design MCQs ( Digital Signal Processing ) in past papers. Past papers of Digital Filters Design MCQs ( Digital Signal Processing ) Mcqs. Past papers of Digital Filters Design MCQs ( Digital Signal Processing ) Mcqs . Mcqs are the necessary part of any competitive / job related exams. The Mcqs having specific numbers in any written test. It is therefore everyone have to learn / remember the related Digital Filters Design MCQs ( Digital Signal Processing ) Mcqs. The Important series of Digital Filters Design MCQs ( Digital Signal Processing ) Mcqs are given below:
Round Off Effects in Digital Filters
1. The quantization inherent in the finite precision arithmetic operations render the system linear.
a) True
b) False
Answer: b
Explanation: In the realization of a digital filter, either in digital hardware or in software on a digital computer, the quantization inherent in the finite precision arithmetic operations render the system linear.
2. In recursive systems, which of the following is caused because of the nonlinearities due to the finite-precision arithmetic operations?
a) Periodic oscillations in the input
b) Non-Periodic oscillations in the input
c) Non-Periodic oscillations in the output
d) Periodic oscillations in the output
Answer: d
Explanation: In the recursive systems, the nonlinearities due to the finite-precision arithmetic operations often cause periodic oscillations to occur in the output even when the input sequence is zero or some non zero constant value.
3. The oscillations in the output of the recursive system are called as ‘limit cycles’.
a) True
b) False
Answer: a
Explanation: In the recursive systems, the nonlinearities due to the finite-precision arithmetic operations often cause periodic oscillations to occur in the output even when the input sequence is zero or some non zero constant value. The oscillations thus produced in the output are known as ‘limit cycles’.
4. Limit cycles in the recursive are directly attributable to which of the following?
a) Round-off errors in multiplication
b) Overflow errors in addition
c) Both of the mentioned
d) None of the mentioned
Answer: c
Explanation: The oscillations in the output of the recursive system are called as limit cycles and are directly attributable to round-off errors in multiplication and overflow errors in addition.
5. What is the range of values called as to which the amplitudes of the output during a limit cycle ae confined to?
a) Stop band
b) Pass band
c) Live band
d) Dead band
Answer: d
Explanation: The amplitudes of the output during a limit circle are confined to a range of values that is called the ‘dead band’ of the filter.
6. Zero input limit cycles occur from non-zero initial conditions with the input x(n)=0.
a) True
b) False
Answer: a
Explanation: When the input sequence x(n) to the filter becomes zero, the output of the filter then, after a number of iterations, enters into the limit cycle. The output remains in the limit cycle until another input of sufficient size is applied that drives the system out of the limit cycle. Similarly, zero input limit cycles occur from non-zero initial conditions with the input x(n)=0.
7. Which of the following is true when the response of the single pole filter is in the limit cycle?
a) Actual non-linear system acts as an equivalent non-linear system
b) Actual non-linear system acts as an equivalent linear system
c) Actual linear system acts as an equivalent non-linear system
d) Actual linear system acts as an equivalent linear system
Answer: b
Explanation: We note that when the response of the single pole filter is in the limit cycle, the actual non-linear system acts as an equivalent linear system with a pole at z=1 when the pole is positive and z=-1 when the poles is negative.
8. Which of the following expressions define the dead band for a single-pole filter?
a) |v(n-1)| ≥ (1/2).2−b1+|a|
b) |v(n-1)| ≥ (1/2).2−b1−|a|
c) |v(n-1)| ≤ (1/2).2−b1−|a|
d) None of the mentioned
Answer: c
Explanation: Since the quantization product av(n-1) is obtained by rounding, it follows that the quantization error is bounded as
|Qr[av(n-1)]-av(n-1)| ≤ (12).2−b
Where ‘b’ is the number of bits (exclusive of sign) used in the representation of the pole ‘a’ and v(n). Consequently, we get
|v(n-1)|-|av(n-1)| ≤ (12).2−b
and hence
|v(n-1)| ≤ (12).2−b1−|a|
9. What is the dead band of a single pole filter with a pole at 1/2 and represented by 4 bits?
a) (-1/2,1/2)
b) (-1/4,1/4)
c) (-1/8,1/8)
d) (-1/16,1/16)
Answer: d
Explanation: We know that
|v(n-1)| ≤ (12).2−b1−|a|
Given |a|=1/2 and b=4 => |v(n-1)| ≤ 1/16=> The dead band is (-1/16,1/16).
10. The limit cycle mode with zero input, which occurs as a result of rounding the multiplications, corresponds to an equivalent second order system with poles at z=±1.
a) True
b) False
Answer: a
Explanation: There is an possible limit cycle mode with zero input, which occurs as a result of rounding the multiplications, corresponds to an equivalent second order system with poles at z=±1. In this case the two pole filter exhibits oscillations with an amplitude that falls in the dead band bounded by 2-b/(1-|a1|-a2).
11. What is the necessary and sufficient condition for a second order filter that no zero-input overflow limit cycles occur?
a) |a1|+|a2|=1
b) |a1|+|a2|>1
c) |a1|+|a2|<1
d) None of the mentioned
Answer: c
Explanation: It can be easily shown that a necessary and sufficient condition for ensuring that no zero-input overflow limit cycles occur is |a1|+|a2|<1
which is extremely restrictive and hence an unreasonable constraint to impose on any second order section.
12. An effective remedy for curing the problem of overflow oscillations is to modify the adder characteristic.
a) True
b) False
Answer: a
Explanation: An effective remedy for curing the problem of overflow oscillations is to modify the adder characteristic, so that it performs saturation arithmetic. Thus when an overflow is sensed, the output of the adder will be the full scale value of ±1.
13. What is the dead band of a single pole filter with a pole at 3/4 and represented by 4 bits?
a) (-1/2,1/2)
b) (-1/8,1/8)
c) (-1/4,1/4)
d) (-1/16,1/16)
Answer: b
Explanation: We know that
|v(n-1)| ≤ (12).2−b1−|a|
Given |a|=3/4 and b=4 => |v(n-1)| ≤ 1/8=> The dead band is (-1/8,1/8).
General Considerations for Design of Digital Filters
1. The ideal low pass filter cannot be realized in practice.
a) True
b) False
Answer: a
Explanation: We know that the ideal low pass filter is non-causal. Hence, a ideal low pass filter cannot be realized in practice.
2. The following diagram represents the unit sample response of which of the following filters?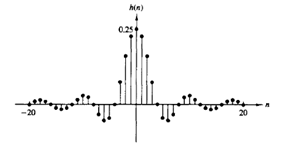
a) Ideal high pass filter
b) Ideal low pass filter
c) Ideal high pass filter at ω=π/4
d) Ideal low pass filter at ω=π/4
Answer: d
Explanation: At n=0, the equation for ideal low pass filter is given as h(n)=ω/π.
From the given figure, h(0)=0.25=>ω=π/4.
Thus the given figure represents the unit sample response of an ideal low pass filter at ω=π/4.
3. If h(n) has finite energy and h(n)=0 for n<0, then which of the following are true?
a) ∫π−π|ln|H(ω)||dω>−∞
b) ∫π−π|ln|H(ω)||dω<∞
c) ∫π−π|ln|H(ω)||dω=∞
d) None of the mentioned
Answer: b
Explanation: If h(n) has finite energy and h(n)=0 for n<0, then according to the Paley-Wiener theorem, we have
∫π−π|ln|H(ω)||dω<∞
4. If |H(ω)| is square integrable and if the integral ∫π−π|ln|H(ω)||dω is finite, then the filter with the frequency response H(ω)=|H(ω)|ejθ(ω) is?
a) Anti-causal
b) Constant
c) Causal
d) None of the mentioned
Answer: c
Explanation: If |H(ω)| is square integrable and if the integral ∫π−π|ln|H(ω)||dω is finite, then we can associate with |H(ω)| and a phase response θ(ω), so that the resulting filter with the frequency response H(ω)=|H(ω)|ejθ(ω) is causal.
5. The magnitude function |H(ω)| can be zero at some frequencies, but it cannot be zero over any finite band of frequencies.
a) True
b) False
Answer: a
Explanation: One important conclusion that we made from the Paley-Wiener theorem is that the magnitude function |H(ω)| can be zero at some frequencies, but it cannot be zero over any finite band of frequencies, since the integral then becomes infinite. Consequently, any ideal filter is non-causal.
6. If h(n) is causal and h(n)=he(n)+ho(n),then what is the expression for h(n) in terms of only he(n)?
a) h(n)=2he(n)u(n)+he(0)δ(n), n ≥ 0
b) h(n)=2he(n)u(n)+he(0)δ(n), n ≥ 1
c) h(n)=2he(n)u(n)-he(0)δ(n), n ≥ 1
d) h(n)=2he(n)u(n)-he(0)δ(n), n ≥ 0
Answer: d
Explanation: Given h(n) is causal and h(n)= he(n)+ho(n)
=>he(n)=1/2[h(n)+h(-n)] Now, if h(n) is causal, it is possible to recover h(n) from its even part he(n) for 0≤n≤∞ or from its odd component ho(n) for 1≤n≤∞.
=>h(n)= 2he(n)u(n)-he(0)δ(n), n ≥ 0.
7. If h(n) is causal and h(n)=he(n)+ho(n),then what is the expression for h(n) in terms of only ho(n)?
a) h(n)=2ho(n)u(n)+h(0)δ(n), n ≥ 0
b) h(n)=2ho(n)u(n)+h(0)δ(n), n ≥ 1
c) h(n)=2ho(n)u(n)-h(0)δ(n), n ≥ 1
d) h(n)=2ho(n)u(n)-h(0)δ(n), n ≥ 0
Answer: b
Explanation: Given h(n) is causal and h(n)= he(n)+ho(n)
=>he(n)=1/2[h(n)+h(-n)] Now, if h(n) is causal, it is possible to recover h(n) from its even part he(n) for 0≤n≤∞ or from its odd component ho(n) for 1≤n≤∞.
=>h(n)= 2ho(n)u(n)+h(0)δ(n), n ≥ 1
since ho(n)=0 for n=0, we cannot recover h(0) from ho(n) and hence we must also know h(0).
8. If h(n) is absolutely summable, i.e., BIBO stable, then the equation for the frequency response H(ω) is given as?
a) HI(ω)-j HR(ω)
b) HR(ω)-j HI(ω)
c) HR(ω)+j HI(ω)
d) HI(ω)+j HR(ω)
Answer: c
Explanation: If h(n) is absolutely summable, i.e., BIBO stable, then the frequency response H(ω) exists and
H(ω)= HR(ω)+j HI(ω)
where HR(ω) and HI(ω) are the Fourier transforms of he(n) and ho(n) respectively.
9. HR(ω) and HI(ω) are interdependent and cannot be specified independently when the system is causal.
a) True
b) False
Answer: a
Explanation: Since h(n) is completely specified by he(n), it follows that H(ω) is completely determined if we know HR(ω). Alternatively, H(ω) is completely determined from HI(ω) and h(0). In short, HR(ω) and HI(ω) are interdependent and cannot be specified independently when the system is causal.
10. What is the Fourier transform of the unit step function U(ω)?
a) πδ(ω)-0.5-j0.5cot(ω/2)
b) πδ(ω)-0.5+j0.5cot(ω/2)
c) πδ(ω)+0.5+j0.5cot(ω/2)
d) πδ(ω)+0.5-j0.5cot(ω/2)
Answer: d
Explanation: Since the unit step function is not absolutely summable, it has a Fourier transform which is given by the equation
U(ω)= πδ(ω)+0.5-j0.5cot(ω/2).
11. The HI(ω) is uniquely determined from HR(ω) through the integral relationship. This integral is called as Continuous Hilbert transform.
a) True
b) False
Answer: b
Explanation: If the HI(ω) is uniquely determined from HR(ω) through the integral relationship. This integral is called as discrete Hilbert transform.
12. The magnitude |H(ω)| cannot be constant in any finite range of frequencies and the transition from pass-band to stop-band cannot be infinitely sharp.
a) True
b) False
Answer: a
Explanation: Causality has very important implications in the design of frequency-selective filters. One among them is the magnitude |H(ω)| cannot be constant in any finite range of frequencies and the transition from pass-band to stop-band cannot be infinitely sharp. This is a consequence of Gibbs phenomenon, which results from the truncation of h(n) to achieve causality.
13. The frequency ωP is called as ______________
a) Pass band ripple
b) Stop band ripple
c) Pass band edge ripple
d) Stop band edge ripple
Answer: c
Explanation: Pass band edge ripple is the frequency at which the pass band starts transiting to the stop band.
14. Which of the following represents the bandwidth of the filter?
a) ωP+ ωS
b) -ωP+ ωS
c) ωP-ωS
d) None of the mentioned
Answer: b
Explanation: If ωP and ωS represents the pass band edge ripple and stop band edge ripple, then the transition width -ωP+ ωS gives the bandwidth of the filter.
Design of FIR Filters
1. Which of the following is the difference equation of the FIR filter of length M, input x(n) and output y(n)?
a) y(n)=∑M+1k=0bkx(n+k)
b) y(n)=∑M+1k=0bkx(n−k)
c) y(n)=∑M−1k=0bkx(n−k)
d) None of the mentioned
Answer: c
Explanation: An FIR filter of length M with input x(n) and output y(n) is described by the difference equation
y(n)=∑M−1k=0bkx(n−k)
where {bk} is the set of filter coefficients.
2. The lower and upper limits on the convolution sum reflect the causality and finite duration characteristics of the filter.
a) True
b) False
Answer: a
Explanation: We can express the output sequence as the convolution of the unit sample response h(n) of the system with the input signal. The lower and upper limits on the convolution sum reflect the causality and finite duration characteristics of the filter.
3. Which of the following condition should the unit sample response of a FIR filter satisfy to have a linear phase?
a) h(M-1-n) n=0,1,2…M-1
b) ±h(M-1-n) n=0,1,2…M-1
c) -h(M-1-n) n=0,1,2…M-1
d) None of the mentioned
Answer: b
Explanation: An FIR filter has an linear phase if its unit sample response satisfies the condition
h(n)= ±h(M-1-n) n=0,1,2…M-1.
4. If H(z) is the z-transform of the impulse response of an FIR filter, then which of the following relation is true?
a) zM+1.H(z-1)=±H(z)
b) z-(M+1).H(z-1)=±H(z)
c) z(M-1).H(z-1)=±H(z)
d) z-(M-1).H(z-1)=±H(z)
Answer: d
Explanation: We know that H(z)=∑M−1k=0h(k)z−k and h(n)=±h(M-1-n) n=0,1,2…M-1
When we incorporate the symmetric and anti-symmetric conditions of the second equation into the first equation and by substituting z-1 for z, and multiply both sides of the resulting equation by z-(M-1) we get z-(M-1).H(z-1)=±H(z)
5. The roots of the polynomial H(z) are identical to the roots of the polynomial H(z-1).
a) True
b) False
Answer: a
Explanation: We know that z-(M-1).H(z-1)=±H(z). This result implies that the roots of the polynomial H(z) are identical to the roots of the polynomial H(z-1).
6. The roots of the equation H(z) must occur in ________________
a) Identical
b) Zero
c) Reciprocal pairs
d) Conjugate pairs
Answer: c
Explanation: We know that the roots of the polynomial H(z) are identical to the roots of the polynomial H(z-1). Consequently, the roots of H(z) must occur in reciprocal pairs.
7. If the unit sample response h(n) of the filter is real, complex valued roots need not occur in complex conjugate pairs.
a) True
b) False
Answer: b
Explanation: We know that the roots of the polynomial H(z) are identical to the roots of the polynomial H(z-1). This implies that if the unit sample response h(n) of the filter is real, complex valued roots must occur in complex conjugate pairs.
8. What is the value of h(M-1/2) if the unit sample response is anti-symmetric?
a) 0
b) 1
c) -1
d) None of the mentioned
Answer: a
Explanation: When h(n)=-h(M-1-n), the unit sample response is anti-symmetric. For M odd, the center point of the anti-symmetric is n=M-1/2. Consequently, h(M-1/2)=0.
9. What is the number of filter coefficients that specify the frequency response for h(n) symmetric?
a) (M-1)/2 when M is odd and M/2 when M is even
b) (M-1)/2 when M is even and M/2 when M is odd
c) (M+1)/2 when M is even and M/2 when M is odd
d) (M+1)/2 when M is odd and M/2 when M is even
Answer: d
Explanation: We know that, for a symmetric h(n), the number of filter coefficients that specify the frequency response is (M+1)/2 when M is odd and M/2 when M is even.
10. What is the number of filter coefficients that specify the frequency response for h(n) anti-symmetric?
a) (M-1)/2 when M is even and M/2 when M is odd
b) (M-1)/2 when M is odd and M/2 when M is even
c) (M+1)/2 when M is even and M/2 when M is odd
d) (M+1)/2 when M is odd and M/2 when M is even
Answer: b
Explanation: We know that, for a anti-symmetric h(n) h(M-1/2)=0 and thus the number of filter coefficients that specify the frequency response is (M-1)/2 when M is odd and M/2 when M is even.
11. Which of the following is not suitable either as low pass or a high pass filter?
a) h(n) symmetric and M odd
b) h(n) symmetric and M even
c) h(n) anti-symmetric and M odd
d) h(n) anti-symmetric and M even
Answer: c
Explanation: If h(n)=-h(M-1-n) and M is odd, we get H(0)=0 and H(π)=0. Consequently, this is not suitable as either a low pass filter or a high pass filter.
12. The anti-symmetric condition with M even is not used in the design of which of the following linear-phase FIR filter?
a) Low pass
b) High pass
c) Band pass
d) Bans stop
Answer: a
Explanation: When h(n)=-h(M-1-n) and M is even, we know that H(0)=0. Thus it is not used in the design of a low pass linear phase FIR filter.
13. The anti-symmetric condition is not used in the design of low pass linear phase FIR filter.
a) True
b) False
Answer: a
Explanation: We know that if h(n)=-h(M-1-n) and M is odd, we get H(0)=0 and H(π)=0. Consequently, this is not suitable as either a low pass filter or a high pass filter and when h(n)=-h(M-1-n) and M is even, we know that H(0)=0. Thus it is not used in the design of a low pass linear phase FIR filter. Thus the anti-symmetric condition is not used in the design of low pass linear phase FIR filter.
Design of Linear Phase FIR Filters Using Windows – 1
1. Which of the following defines the rectangular window function of length M-1?
a)
w(n)=1, n=0,1,2...M-1
=0, else where
b)
w(n)=1, n=0,1,2...M-1
=-1, else where
c)
w(n)=0, n=0,1,2...M-1
=1, else where
d) None of the mentioned
Answer: a
Explanation: We know that the rectangular window of length M-1 is defined as
w(n)=1, n=0,1,2…M-1
=0, else where.
2. The multiplication of the window function w(n) with h(n) is equivalent to the multiplication of H(w) and W(w).
a) True
b) False
Answer: b
Explanation: According to the basic formula of convolution, the multiplication of two signals w(n) and h(n) in time domain is equivalent to the convolution of their respective Fourier transforms W(w) and H(w).
3. What is the Fourier transform of the rectangular window of length M-1?
a) ejω(M−1)/2sin(ωM2)sin(ω2)
b) ejω(M+1)/2sin(ωM2)sin(ω2)
c) e−jω(M+1)/2sin(ωM2)sin(ω2)
d) e−jω(M−1)/2sin(ωM2)sin(ω2)
Answer: d
Explanation: We know that the Fourier transform of a function w(n) is defined as
W(ω)=∑M−1n=0w(n)e−jωn
For a rectangular window, w(n)=1 for n=0,1,2….M-1
Thus we get
W(ω)=∑M−1n=0w(n)e−jωn=e−jω(M−1)/2sin(ωM2)sin(ω2)
4. What is the magnitude response |W(ω)| of a rectangular window function?
a) |sin(ωM/2)||sin(ω/2)|
b) |sin(ω/2)||sin(ωM/2)|
c) |cos(ωM/2)||sin(ω/2)|
d) None of the mentioned
Answer: a
Explanation: We know that for a rectangular window
W(ω)=∑M−1n=0w(n)e−jωn=e−jω(M−1)/2sin(ωM2)sin(ω2)
Thus the window function has a magnitude response
|W(ω)|=|sin(ωM/2)||sin(ω/2)|
5. What is the width of the main lobe of the frequency response of a rectangular window of length M-1?
a) π/M
b) 2π/M
c) 4π/M
d) 8π/M
Answer: c
Explanation: The width of the main lobe width is measured to the first zero of W(ω)) is 4π/M.
6. The width of each side lobes decreases with an increase in M.
a) True
b) False
Answer: a
Explanation: Since the width of the main lobe is inversely proportional to the value of M, if the value of M increases then the main lobe becomes narrower. In fact, the width of each side lobes decreases with an increase in M.
Discrete Time Systems Implementation MCQs
7. With an increase in the value of M, the height of each side lobe ____________
a) Do not vary
b) Does not depend on value of M
c) Decreases
d) Increases
Answer: d
Explanation: The height of each side lobes increase with an increase in M such a manner that the area under each side lobe remains invariant to changes in M.
8. As M is increased, W(ω) becomes wider and the smoothening produced by the W(ω) is increased.
a) True
b) False
Answer: b
Explanation: As M is increased, W(ω) becomes narrower and the smoothening produced by the W(ω) is reduced.
9. Which of the following windows has a time domain sequence h(n)=1−2|n−M−12|M−1?
a) Bartlett window
b) Blackman window
c) Hanning window
d) Hamming window
Answer: a
Explanation: The Bartlett window which is also called as triangular window has a time domain sequence as
h(n)=1−2|n−M−12|M−1, 0≤n≤M-1.
10. The width of each side lobes decreases with an decrease in M.
a) True
b) False
Answer: b
Explanation: Since the width of the main lobe is inversely proportional to the value of M, if the value of M increases then the main lobe becomes narrower. In fact, the width of each side lobes decreases with an increase in M.
11. What is the approximate transition width of main lobe of a Hamming window?
a) 4π/M
b) 8π/M
c) 12π/M
d) 2π/M
Answer: b
Explanation: The transition width of the main lobe in the case of Hamming window is equal to 8π/M where M is the length of the window.
Design of Linear Phase FIR Filters Using Windows – 2
1. What is the peak side lobe (in dB) for a rectangular window?
a) -13
b) -27
c) -32
d) -58
Answer: a
Explanation: The peak side lobe in the case of rectangular window has a value of -13dB.
2. What is the peak side lobe (in dB) for a Hanning window?
a) -13
b) -27
c) -32
d) -58
Answer: c
Explanation: The peak side lobe in the case of Hanning window has a value of -32dB.
3. How does the frequency of oscillations in the pass band of a low pass filter varies with the value of M?
a) Decrease with increase in M
b) Increase with increase in M
c) Remains constant with increase in M
d) None of the mentioned
Answer: b
Explanation: The frequency of oscillations in the pass band of a low pass filter increases with an increase in the value of M, but they do not diminish in amplitude.
4. The oscillatory behavior near the band edge of the low pass filter is known as Gibbs phenomenon.
a) True
b) False
Answer: a
Explanation: The multiplication of hd(n) with a rectangular window is identical to truncating the Fourier series representation of the desired filter characteristic Hd(ω). The truncation of Fourier series is known to introduce ripples in the frequency response characteristic H(ω) due to the non-uniform convergence of the Fourier series at a discontinuity. The oscillatory behavior near the band edge of the low pass filter is known as Gibbs phenomenon.
5. Which of the following window is used in the design of a low pass filter to have a frequency response as shown in the figure?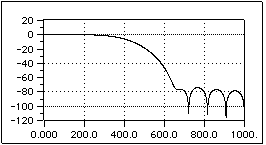
a) Hamming window
b) Hanning window
c) Kaiser window
d) Blackman window
Answer: d
Explanation: The frequency response shown in the figure is the frequency response of a low pass filter designed using a Blackman window of length M=61.
6. Which of the following window is used in the design of a low pass filter to have a frequency response as shown in the figure?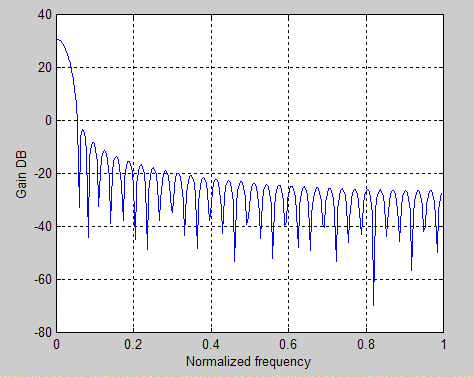
a) Hamming window
b) Hanning window
c) Kaiser window
d) Blackman window
Answer: c
Explanation: The frequency response shown in the figure is the frequency response of a low pass filter designed using a Kaiser window of length M=61 and α=4.
7. What is the approximate transition width of main lobe of a Blackman window?
a) 4π/M
b) 8π/M
c) 12π/M
d) 2π/M
Answer: c
Explanation: The transition width of the main lobe in the case of Blackman window is equal to 12π/M where M is the length of the window.
8. Which of the following windows has a time domain sequence h(n)=12(1−cos2πnM−1)?
a) Bartlett window
b) Blackman window
c) Hamming window
d) Hanning window
Answer: d
Explanation: The Hanning window has a time domain sequence as
h(n)=12(1−cos2πnM−1), 0≤n≤M-1
9. If the value of M increases then the main lobe in the frequency response of the rectangular window becomes broader.
a) True
b) False
Answer: b
Explanation: Since the width of the main lobe is inversely proportional to the value of M, if the value of M increases then the main lobe becomes narrower.
10. The large side lobes of W(ω) results in which of the following undesirable effects?
a) Circling effects
b) Broadening effects
c) Ringing effects
d) None of the mentioned
Answer: c
Explanation: The larger side lobes of W(ω) results in the undesirable ringing effects in the FIR filter frequency response H(ω), and also in relatively large side lobes in H(ω).
Design of Linear Phase FIR Filters by Frequency Sampling Method
1. In the frequency sampling method for FIR filter design, we specify the desired frequency response Hd(ω) at a set of equally spaced frequencies.
a) True
b) False
Answer: a
Explanation: In the frequency sampling method, we specify the frequency response Hd(ω) at a set of equally spaced frequencies, namely ωk=2πM(k+α)
2. To reduce side lobes, in which region of the filter the frequency specifications have to be optimized?
a) Stop band
b) Pass band
c) Transition band
d) None of the mentioned
Answer: c
Explanation: To reduce the side lobes, it is desirable to optimize the frequency specification in the transition band of the filter. This optimization can be accomplished numerically on a digital computer by means of linear programming techniques.
3. What is the frequency response of a system with input h(n) and window length of M?
a) ∑M−1n=0h(n)ejωn
b) ∑Mn=0h(n)ejωn
c) ∑Mn=0h(n)e−jωn
d) ∑M−1n=0h(n)e−jωn
Answer: d
Explanation: The desired output of an FIR filter with an input h(n) and using a window of length M is given as
H(ω)=∑M−1n=0h(n)e−jωn
4. What is the relation between H(k+α) and h(n)?
a) H(k+α)=∑M+1n=0h(n)e−j2π(k+α)n/M; k=0,1,2…M+1
b) H(k+α)=∑M−1n=0h(n)e−j2π(k+α)n/M; k=0,1,2…M-1
c) H(k+α)=∑Mn=0h(n)e−j2π(k+α)n/M; k=0,1,2…M
d) None of the mentioned
Answer: b
Explanation: We know that
ωk=2πM(k+α) and H(ω)=∑M−1n=0h(n)e−jωn
Thus from substituting the first in the second equation, we get
H(k+α)=∑M−1n=0h(n)e−j2π(k+α)n/M; k=0,1,2…M-1
5. Which of the following is the correct expression for h(n) in terms of H(k+α)?
a) 1M∑M−1k=0H(k+α)ej2π(k+α)n/M; n=0,1,2…M-1
b) ∑M−1k=0H(k+α)ej2π(k+α)n/M; n=0,1,2…M-1
c) 1M∑M+1k=0H(k+α)ej2π(k+α)n/M; n=0,1,2…M+1
d) ∑M+1k=0H(k+α)ej2π(k+α)n/M; n=0,1,2…M+1
Answer: a
Explanation: We know that
H(k+α)=∑M−1n=0h(n)e−j2π(k+α)n/M; k=0,1,2…M-1
If we multiply the above equation on both sides by the exponential exp(j2πkm/M), m=0,1,2….M-1 and sum over k=0,1,….M-1, we get the equation
h(n)=1M∑M−1k=0H(k+α)ej2π(k+α)n/M; n=0,1,2…M-1
6. Which of the following is equal to the value of H(k+α)?
a) H*(M-k+α)
b) H*(M+k+α)
c) H*(M+k-α)
d) H*(M-k-α)
Answer: d
Explanation: Since {h(n)} is real, we can easily show that the frequency samples {H(k+α)} satisfy the symmetry condition
H(k+α)= H*(M-k-α).
7. The linear equations for determining {h(n)} from {H(k+α)} are not simplified.
a) True
b) False
Answer: b
Explanation: The symmetry condition, along with the symmetry conditions for {h(n)}, can be used to reduce the frequency specifications from M points to (M+1)/2 points for M odd and M/2 for M even. Thus the linear equations for determining {h(n)} from {H(k+α)} are considerably simplified.
8. The major advantage of designing linear phase FIR filter using frequency sampling method lies in the efficient frequency sampling structure.
a) True
b) False
Answer: a
Explanation: Although the frequency sampling method provides us with another means for designing linear phase FIR filters, its major advantage lies in the efficient frequency sampling structure, which is obtained when most of the frequency samples are zero.
9. Which of the following is introduced in the frequency sampling realization of the FIR filter?
a) Poles are more in number on unit circle
b) Zeros are more in number on the unit circle
c) Poles and zeros at equally spaced points on the unit circle
d) None of the mentioned
Answer: c
Explanation: There is a potential problem for frequency sampling realization of the FIR linear phase filter. The frequency sampling realization of the FIR filter introduces poles and zeros at equally spaced points on the unit circle.
10. In a practical implementation of the frequency sampling realization, quantization effects preclude a perfect cancellation of the poles and zeros.
a) True
b) False
Answer: a
Explanation: In the ideal situation, the zeros cancel the poles and, consequently, the actual zeros of the H(z) are determined by the selection of the frequency samples H(k+α). In a practical implementation of the frequency sampling realization, however, quantization effects preclude a perfect cancellation of the poles and zeros.
11. In the frequency sampling method for FIR filter design, we specify the desired frequency response Hd(ω) at a set of equally spaced frequencies.
a) True
b) False
Answer: a
Explanation: According to the frequency sampling method for FIR filter design, the desired frequency response is specified at a set of equally spaced frequencies.
12. What is the equation for the frequency ωk in the frequency response of an FIR filter?
a) πM(k+α)
b) 4πM(k+α)
c) 8πM(k+α)
d) 2πM(k+α)
Answer: d
Explanation: In the frequency sampling method for FIR filter design, we specify the desired frequency response Hd(ω) at a set of equally spaced frequencies, namely
ωk=2πM(k+α)
where k=0,1,2…M-1/2 and α=0 0r 1/2.
13. Why is it desirable to optimize frequency response in the transition band of the filter?
a) Increase side lobe
b) Reduce side lobe
c) Increase main lobe
d) None of the mentioned
Answer: b
Explanation: To reduce side lobes, it is desirable to optimize the frequency specification in the transition band of the filter.
Design of Optimum Equi Ripple Linear Phase FIR Filters – 1
1. Which of the following filter design is used in the formulation of design of optimum equi ripple linear phase FIR filter?
a) Butterworth approximation
b) Chebyshev approximation
c) Hamming approximation
d) None of the mentioned
Answer: b
Explanation: The filter design method described in the design of optimum equi ripple linear phase FIR filters is formulated as a chebyshev approximation problem.
2. If δ2 represents the ripple in the stop band for a chebyshev filter, then which of the following conditions is true?
a) 1-δ2 ≤ Hr(ω) ≤ 1+δ2;|ω|≤ωs
b) 1+δ2 ≤ Hr(ω) ≤ 1-δ2;|ω|≥ωs
c) δ2 ≤ Hr(ω) ≤ δ2;|ω|≤ωs
d) -δ2 ≤ Hr(ω) ≤ δ2;|ω|≥ωs
Answer: d
Explanation: Let us consider the design of a low pass filter with the stop band edge frequency ωs and the ripple in the stop band is δ2, then from the general specifications of the chebyshev filter, in the stop band the filter frequency response should satisfy the condition
-δ2 ≤ Hr(ω) ≤ δ2;|ω|≥ωs
3. If the filter has anti-symmetric unit sample response with M even, then what is the value of Q(ω)?
a) cos(ω/2)
b) sin(ω/2)
c) 1
d) sinω
Answer: b
Explanation: If the filter has a anti-symmetric unit sample response, then we know that
h(n)= -h(M-1-n)
and for M even in this case, Q(ω)=sin(ω/2).
4. It is convenient to normalize W(ω) to unity in the stop band and set W(ω)=δ2/ δ1 in the pass band.
a) True
b) False
Answer: a
Explanation: The weighting function on the approximation error allows to choose the relative size of the errors in the different frequency bands. In particular, it is convenient to normalize W(ω) to unity in the stop band and set W(ω)=δ2/δ1 in the pass band.
5. Which of the following defines the weighted approximation error?
a) W(ω)[Hdr(ω)+Hr(ω)]
b) W(ω)[Hdr(ω)-Hr(ω)]
c) W(ω)[Hr(ω)-Hdr(ω)]
d) None of the mentioned
Answer: b
Explanation: The weighted approximation error is defined as E(ω) which is given as
E(ω)=W(ω)[Hdr(ω)- Hr(ω)].
6. The error function E(ω) does not alternate in sign between two successive extremal frequencies.
a) True
b) False
Answer: b
Explanation: The error function E(ω) alternates in sign between two successive extremal frequency, Hence the theorem is called as Alternative theorem.
7. At most how many extremal frequencies can be there in the error function of ideal low pass filter?
a) L+1
b) L+2
c) L+3
d) L
Answer: c
Explanation: We know that we can have at most L-1 local maxima and minima in the open interval 0<ω<π. In addition, ω=0 and π are also usually extrema. It is also maximum at ω for pass band and stop band frequencies. Thus the error function of a low pass filter has at most L+3 extremal frequencies.
8. The filter designs that contain more than L+2 alternations are called as ______________
a) Extra ripple filters
b) Maximal ripple filters
c) Equi ripple filters
d) None of the mentioned
Answer: a
Explanation: In general, the filter designs that contain more than L+2 alternations or ripples are called as Extra ripple filters.
9. If M is the length of the filter, then at how many number of points, the error function is computed?
a) 2M
b) 4M
c) 8M
d) 16M
Answer: d
Explanation: Having the solution for P(ω), we can now compute the error function E(ω) from
E(ω)=W(ω)[Hdr(ω)-Hr(ω)] on a dense set of frequency points. Usually, a number of points equal to 16M, where M is the length of the filter.
10. If |E(ω)|<δ for some frequencies on the dense set, then a new set of frequencies corresponding to the L+2 largest peaks of |E(ω)| are selected and computation is repeated.
a) True
b) False
Answer: b
Explanation: If |E(ω)|≥δ for some frequencies on the dense set, then a new set of frequencies corresponding to the L+2 largest peaks of |E(ω)| are selected and computation is repeated.
11. What is the value of JTYPE in the Parks-McClellan program for a Hilbert transformer?
a) 1
b) 2
c) 3
d) 4
Answer: c
Explanation: The value of JTYPE=3 in the Parks-McClellan program to select a filter that performs Hilbert transformer.
12. In Parks-McClellan program, the grid density for interpolating the error function is denoted by which of the following functions?
a) NFILT
b) NBANDS
c) EDGE
d) LGRID
Answer: d
Explanation: In Parks-McClellan program, LGRID represents the grid density for interpolating the error function. The default value is 16 if left unspecified.
13. In Parks-McClellan program, an array of maximum size 10 that specifies the desired frequency response in each band is denoted by?
a) WTX
b) FX
c) EDGE
d) None of the mentioned
Answer: b
Explanation: FX denotes an array of maximum size 10 that specifies the desired frequency response in each band.
Design of Optimum Equi Ripple Linear Phase FIR Filters – 2
1. If δ1 represents the ripple in the pass band for a chebyshev filter, then which of the following conditions is true?
a) 1-δ1 ≤ Hr(ω) ≤ 1+δ1; |ω|≤ωP
b) 1+δ1 ≤ Hr(ω) ≤ 1-δ1; |ω|≥ωP
c) 1+δ1 ≤ Hr(ω) ≤ 1-δ1; |ω|≤ωP
d) 1-δ1 ≤ Hr(ω) ≤ 1+δ1; |ω|≥ωP
Answer: a
Explanation: Let us consider the design of a low pass filter with the pass band edge frequency ωP and the ripple in the pass band is δ1, then from the general specifications of the chebyshev filter, in the pass band the filter frequency response should satisfy the condition
1- δ1 ≤ Hr(ω) ≤ 1+δ1; |ω|≤ωP
2. If the filter has symmetric unit sample response with M odd, then what is the value of Q(ω)?
a) cos(ω/2)
b) sin(ω/2)
c) 1
d) sinω
Answer: c
Explanation: If the filter has a symmetric unit sample response, then we know that
h(n)=h(M-1-n)
and for M odd in this case, Q(ω)=1.
3. If the filter has anti-symmetric unit sample response with M odd, then what is the value of Q(ω)?
a) cos(ω/2)
b) sin(ω/2)
c) 1
d) sinω
Answer: d
Explanation: If the filter has a anti-symmetric unit sample response, then we know that
h(n)= -h(M-1-n)
and for M odd in this case, Q(ω)=sin(ω).
4. In which of the following way the real valued desired frequency response is defined?
a) Unity in stop band and zero in pass band
b) Unity in both pass and stop bands
c) Unity in pass band and zero in stop band
d) Zero in both stop and pass band
Answer: c
Explanation: The real valued desired frequency response Hdr(ω) is simply defined to be unity in the pass band and zero in the stop band.
5. The error function E(ω) should exhibit at least how many extremal frequencies in S?
a) L
b) L-1
c) L+1
d) L+2
Answer: d
Explanation: According to Alternation theorem, a necessary and sufficient condition for P(ω) to be unique, best weighted chebyshev approximation, is that the error function E(ω) must exhibit at least L+2 extremal frequencies in S.
6. The filter designs that contain maximum number of alternations are called as ______________
a) Extra ripple filters
b) Maximal ripple filters
c) Equi ripple filters
d) None of the mentioned
Answer: b
Explanation: In general, the filter designs that contain maximum number of alternations or ripples are called as maximal ripple filters.
7. Remez exchange algorithm is an iterative algorithm used in error approximation.
a) True
b) False
Answer: a
Explanation: Initially, we neither know the set of external frequencies nor the parameters. To solve for the parameters, we use an iterative algorithm called the Remez exchange algorithm, in which we begin by guessing at the set of extremal frequencies.
8. When |E(ω)|≤δ for all frequencies on the dense set, the optimal solution has been found in terms of the polynomial H(ω).
a) True
b) False
Answer: a
Explanation: |E(ω)|≥δ for some frequencies on the dense set, then a new set of frequencies corresponding to the L+2 largest peaks of |E(ω)| are selected and computation is repeated. Since the new set of L+2 extremal frequencies are selected to increase in each iteration until it converges to the upper bound, this implies that when |E(ω)|≤δ for all frequencies on the dense set, the optimal solution has been found in terms of the polynomial H(ω).
9. In Parks-McClellan program, an array of maximum size 10 that specifies the weight function in each band is denoted by?
a) WTX
b) FX
c) EDGE
d) None of the mentioned
Answer: a
Explanation: FX denotes an array of maximum size 10 that specifies the weight function in each band.
10. The filter designs which are formulated using chebyshev approximating problem have ripples in?
a) Pass band
b) Stop band
c) Pass & Stop band
d) Restart band
Answer: c
Explanation: The chebyshev approximation problem is viewed as an optimum design criterion on the sense that the weighted approximation error between the desired frequency response and the actual frequency response is spread evenly across the pass band and evenly across the stop band of the filter minimizing the maximum error. The resulting filter designs have ripples in both pass band and stop band.
11. If the filter has symmetric unit sample response with M even, then what is the value of Q(ω)?
a) cos(ω/2)
b) sin(ω/2)
c) 1
d) sinω
Answer: a
Explanation: If the filter has a symmetric unit sample response, then we know that
h(n)=h(M-1-n)
and for M even in this case, Q(ω)=cos(ω/2).