Signals and Systems MCQs – Time Domain Representation for LTI Systems MCQs ( Signals and Systems ) MCQs

Latest Signals and Systems MCQs
By practicing these MCQs of Time Domain Representation for LTI Systems MCQs ( Signals and Systems ) MCQs – Latest Competitive MCQs , an individual for exams performs better than before. This post comprising of objective questions and answers related to “ Time Domain Representation for LTI Systems MCQs ( Signals and Systems ) Mcqs “. As wise people believe “Perfect Practice make a Man Perfect”. It is therefore practice these mcqs of Signals and Systems to approach the success. Tab this page to check ” Time Domain Representation for LTI Systems MCQs ( Signals and Systems )” for the preparation of competitive mcqs, FPSC mcqs, PPSC mcqs, SPSC mcqs, KPPSC mcqs, AJKPSC mcqs, BPSC mcqs, NTS mcqs, PTS mcqs, OTS mcqs, Atomic Energy mcqs, Pak Army mcqs, Pak Navy mcqs, CTS mcqs, ETEA mcqs and others.
Signals and Systems MCQs – Time Domain Representation for LTI Systems MCQs ( Signals and Systems ) MCQs
The most occurred mcqs of Time Domain Representation for LTI Systems MCQs ( Signals and Systems ) in past papers. Past papers of Time Domain Representation for LTI Systems MCQs ( Signals and Systems ) Mcqs. Past papers of Time Domain Representation for LTI Systems MCQs ( Signals and Systems ) Mcqs . Mcqs are the necessary part of any competitive / job related exams. The Mcqs having specific numbers in any written test. It is therefore everyone have to learn / remember the related Time Domain Representation for LTI Systems MCQs ( Signals and Systems ) Mcqs. The Important series of Time Domain Representation for LTI Systems MCQs ( Signals and Systems ) Mcqs are given below:
Convolution : Impulse Response Representation for LTI Systems – 1
1. Impulse response is the output of ______ system due to impulse input applied at time=0?
a) Linear
b) Time varying
c) Time invariant
d) Linear and time invariant
Answer: d
Explanation: Impulse response is the output of LTI system due to impulse input applied at time = 0 or n=0. Behaviour of an LTI system is characterised by the impulse response.
2. Which of the following is correct regarding to impulse signal?
a) x[n]δ[n] = x[0]δ[n]
b) x[n]δ[n] = δ[n]
c) x[n]δ[n] = x[n]
d) x[n]δ[n] = x[0]
Answer: a
Explanation: When the input x[n] is multiplied with an impulse signal, the result will be impulse signal with magnitude of x[n] at that time.
3. Weighted superposition of time-shifted impulse responses is termed as _______ for discrete-time signals.
a) Convolution integral
b) Convolution multiple
c) Convolution sum
d) Convolution
Answer: c
Explanation: Weighted superposition of time-shifted impulse responses is called convolution sum for discrete-time signals and convolution integral for continuous-time signals.
4. Which of the following is a correct expression for Impulse response?
Answer: a
Explanation: X [n] is represented as the weighted sum of time shifted impulses and concisely written as x[n] = ∑∞k=-∞ x[k]δ[n-k]..
5. Determine the output of a LTI system, 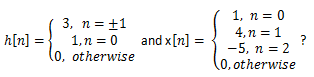
a) 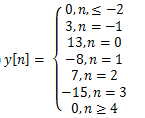
b) 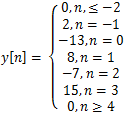
c) 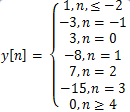
d) 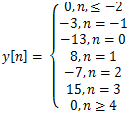
Answer: a
Explanation: X [n] is written as x[n]=δ[n]+4δ[n-1]-5δ[n-2] and y[n]=h[n]+4h[n-1]-5h[n-2]. By substituting the values for n = ….-2,-1, 0, 1, 2…. And corresponding h [n] we get y [n].
6. Determine the output of LTI system to 
a) 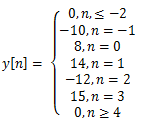
b) 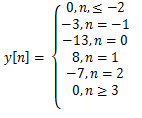
c) 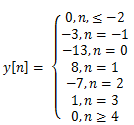
d) 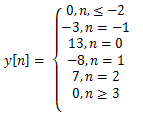
Answer: b
Explanation: x[n]=5δ[n]+6δ[n-1] andy[n]=5h[n]+6h[n-1]. By substituting the values for n = ….-2,-1, 0, 1, 2…. And corresponding h[n] we get the output sequence y[n].
7. Find the convolution sum of sequences x1[n] = (1, 2, 3) and x2[n] = (2, 1, 4).
a) {2, 5, 12, 11, 12}
b) {2, 12, 5, 11, 12}
c) {2, 11, 5, 12, 12}
d) {-2, 5,-12, 11, 12}
Answer: a
Explanation: x1[n] = δ(n)+2δ(n-1)+3δ(n-2) and x2[n] = 2δ(n)+δ(n-1)+4δ(n-2)
Y[n] = x1[n]*x2[n] by performing convolution operation on x1[n] and x2[n] we get the sequence as {2, 5, 12, 11, 12}.
8. Find the convolution sum of sequence x1[n] = {1, 2, 3} and ![]()

Answer: a
Explanation: x1[n] and x2[n] can be written as x1[n] = δ(n)+2δ(n-1)+3δ(n-2) and
x2[n] = δ(N+2) + 2 2δ(n+1) + 3δ(n) + 4δ(n-1) and convolving x1[n], x2[n] we get
Y [n] = {1, 4, 10, 16, 17, 12}.
↑
9. Determine the output of LTI with input x[n] =2δ(n)-δ(n-1) and h[n] given as below.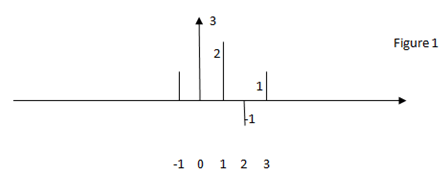

Answer: b
Explanation: The h[n] can be written as
{1, 3, 2,-1, 1}.
↑
By convolving x[n] with the given h[n] we get the following sequence as result
Y [n] = {2, 5, 1, -4, 3, -1}.
10. Consider h [n] as in figure 1 and x[n] = u[n] – u [n-3], determine the output y [n] of the LTI system?
Answer: a
Explanation: The h[n] can be written as
{1, 3, 2,-1, 1}.
↑
By convolving x [n] with the given h [n] we get the output
y [n] = {1,4,6,4,2,0,1}.
↑
Convolution : Impulse Response Representation for LTI Systems – 2
1. The convolution sum is given by _____ equation.
Answer: a
Explanation: By the definition of convolution sum we can write the equation as
x[n]*h[n] = ∑∞k=-∞ x[k]h[n-k].
2. When the sequences x1 [n] = u [n] and x2 [n] = u [n-3], the output of LTI system is given as _____
a) y[n] = n-2, n>3
b) y[n] = n-2, n≥3
c) y[n] = n+2, n>3
d) y[n] = n-2, n≤3
Answer: b
Explanation: The output y[n] =∑∞k=-∞u(k)u(n-k-3), by solving the above summation either by graphically or by direct summation we get ![]() .
.
3. The impulse response h (t) of an LTI system is given by e-2t.u(t) . What is the step response?
a) y(t) = 1⁄2 (1 – e-2t) u (t)
b) y(t) = 1⁄2 (1 – e-2t)
c) y(t) = (1- e-2t) u (t)
d) y(t) = 1⁄2 (e-2t) u (t)
Answer: a
Explanation: Given x (t) = u (t) and h (t) = e-2t.u(t). By using convolution integral![]()
We get output y (t) as y(t) = 1⁄2 (1 – e-2t) u (t).
4. Is (t)*h(t) = h(t)*x(t)?
a) True
b) False
Answer: a
Explanation: By the properties of convolution we say that x(t)*h(t) = h(t)*x(t)
It can be proved using the convolution integral![]() .
.
Three- Domain Analysis of CT Systems MCQs
5. Compute u (t) convolved with itself?
a) y(t)=t.u(t)
b) y(t)=u(t)
c) y(t)=t2.u(t)
d) y(t)=t.u(t-1)
Answer: a
Explanation: By taking x (t) = u (t) and h (t) = u (t) and substituting in the integral![]() On solving the given integral we get y (t) = t u (t).
On solving the given integral we get y (t) = t u (t).
6. Convolve the signals e-2t u(t), e-3t u(t). Determine the output?
a) y(t) = (e-2t – e-3t)u(t)
b) y(t) = (e-2t – e-3t)
c) y(t) = (e-3t – e-2t)u(t)
d) y(t) = (e-t – e-3t)u(t)
Answer: a
Explanation: By solving the convolution integral![]() , we get output asy(t) = (e-2t – e-3t)u(t).
, we get output asy(t) = (e-2t – e-3t)u(t).
7. Convolve graphically.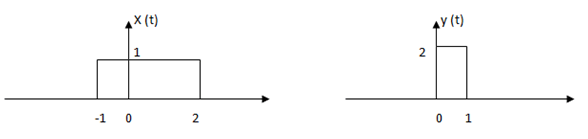
a) 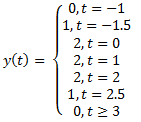
b) 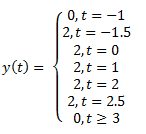
c) 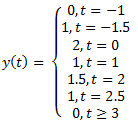
d) 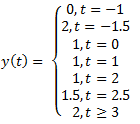
Answer: a
Explanation: Step 1: sketch x (τ) and h (-τ)
Step 2: Obtain the product x (τ) h (t-τ) and the area under this product will give y (0)
Step 3: sketch h (1-τ) and compute y (1) and so on
Step 4: similarly sketch h (-1-τ) and compute y (-1) and so on.
Hence we get the output as .
8. Convolve graphically the below given signals, and determine the correct sequence?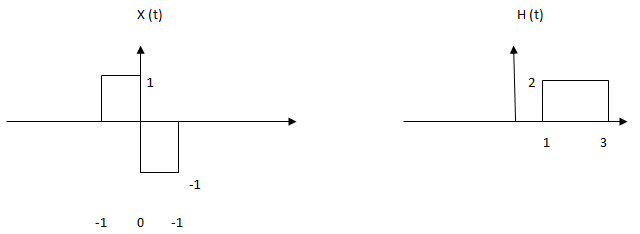
a) Y (-1) = 0, y (1) = 2, y (3) = 2
b) Y (-1) = 2, y (1) = 2, y (3) = 2
c) Y (-1) = 0, y (1) = 0, y (3) = 2
d) Y (-1) = 0, y (1) = 3, y (3) = 2
Answer: a
Explanation: Step 1: sketch x (τ) and h (-τ)
Step 2: Obtain the product x (τ) h (t-τ) and the area under this product will give y (0)
Step 3: sketch h (1-τ) and compute y (1) and so on
Step 4: similarly sketch h (-1-τ) and compute y (-1) and so on.
By following above steps we get the output as 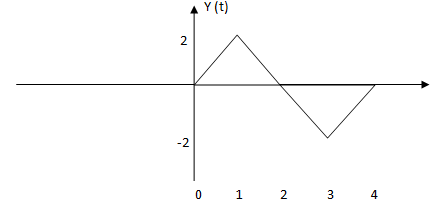
9. Convolve given x (t) with itself and choose the correct output.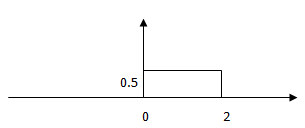
a) 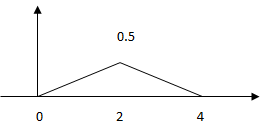
b)
c)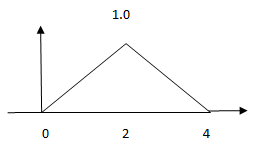
d) 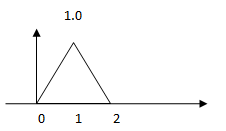
Answer: a
Explanation: Step 1: sketch x (τ) and h (-τ)
Step 2: Obtain the product x (τ) h (t-τ) and the area under this product will give y (0)
Step 3: sketch h (1-τ) and compute y (1) and so on
Step 4: similarly sketch h (-1-τ) and compute y (-1) and so on.
By computing the above steps we get output y (t).
10. Find the convolution of x1[n] = {1, 2, 3, 4} and x2[n] = {2, 1, 2, 1}.
a) Y[n] = {14, 10, 14, 10}
b) Y [n] = {14, 16, 14, 16}
c) Y [n] = {14, 16,-14,-16}
d) Y [n] = {14,-16,-14, 16}
Answer: b
Explanation: By using convolution sum we get x1[n]*x2[n] = {14, 16, 14, 16}. This can be verified using tabular method of convolution.
Properties of the Impulse Response Representation for LTI Systems
[NOTE:’*’ is reffered as convolution operation]
1. If two LTI systems with impulse response h1 (t) and h2 (t) and are connected in parallel then output is given by ______
a) y(t) = x(t) *(h1(t) + h2(t))
b) y(t) = x(t) + (h1(t) + h2(t))
c) y(t) = x(t) * (h1(t) h2(t))
d) y(t) = (x(t) * h1(t)) + h2(t)
Answer: a
Explanation: The equivalent impulse response of two systems connected in parallel is the sum of individual impulse responses. It is represented as
y(t) = x(t) * h1(t) + x(t) * h2(t) = x(t) * (h1(t) + h2(t)).
2. When two LTI systems with impulse responses ha (t) and hb (t) are cascaded then equivalent response is given by ______
a) h(t) = ha(t) + hb(t)
b) h(t) = ha(t) – hb(t)
c) h(t) = ha(t) hb(t)
d) h(t) = ha(t) * hb(t)
Answer: d
Explanation: The equivalent impulse response of two systems connected in series (cascaded) is given by convolution of individual impulse responses.
3. What is this property of impulse response is called ___________
h1(t) * h2(t) = h2(t) * h1(t)
a) Associative property
b) Commutative property
c) Distributive property
d) Closure law
Answer: b
Explanation: Impulse response exhibits commutative property and it is given mathematically by the equation
h1(t) * h2(t) = h2(t) * h1(t).
4. The overall impulse response of the system is given by ______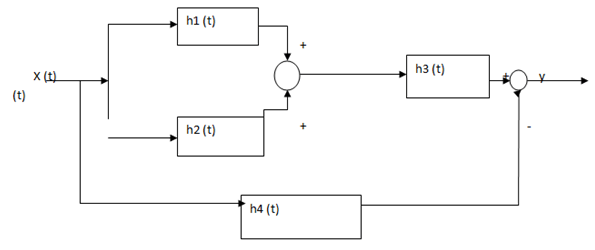
a) h(t) = (h1(t) + h2(t) * h3(t)) – h4(t)
b) y(t) = x(t) * (h1(t) + h2(t)*h3(t)) – h4(t)
c) h(t) = (h1(t) + h2(t) * h3(t)) + h4(t) * x(t)
d) h(t) = (h1(t) h2(t) * h3(t)) – h4(t)
Answer: a
Explanation: In the above given system h1 (t) and h2 (t) are connected in parallel hence it is
h1 (t) +h2 (t) which is cascaded to h3 (t) and its equivalent is connected in parallel with h4 (t). Hence the equivalent impulse response is given by h(t) = (h1(t) + h2(t) * h3(t)) – h4(t).
5. The overall impulse response of the system is given by ______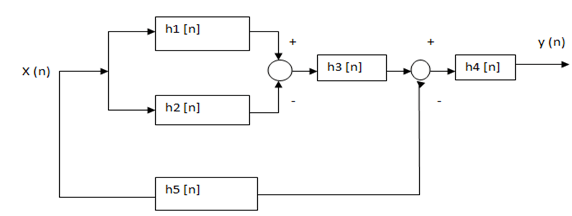
a) h[n] = (h1[n]-h2[n])*h3[n]+h5[n]*h4[n]
b) h[n] = (((h1[n]-h2[n])*h3[n])+h5[n])*h4[n]
c) h[n] = (((h1[n]-h2[n])*h3[n])-h5[n])*h4[n]
d) h[n] = (((h1[n]-h2[n])*-h3[n])-h5[n])*h4[n]
Answer: c
Explanation: Here in the above system h1 [n] and h2 [n] are connected in parallel and given by h1 [n] – h2 [n], this is cascaded with h3 [n] and given by (h1 [n] – h2 [n]) * h3 [n], this is again connected in parallel with h5 [n] and its equivalent is cascaded with h4 [n]. The equivalent response is given by h[n] = (((h1[n]-h2[n])*h3[n])-h5[n])*h4[n].
6. The condition for memory-less system is given by _____
a) h[k] = cδ[k]
b) h[k] = cδ[n-k]
c) h[k] = ch[k]δ[k]
d) h[k] = ch[n-k]δ[k]
Answer: a
Explanation: The LTI discrete-time system is said to be memory-less if and only if it satisfies the condition h[k]=cδ[k]. All memory-less LTI systems perform scalar multiplication on the input.
7. The causal continuous system with impulse response should satisfy ____ equation.
a) h(t)=0,t<0
b) h(t)=0,t>0
c) h(t)≠0,t<0
d) h(t)≠0,t≤0
Answer: a
Explanation: To the continuous system to be causal, the impulse response should satisfy the equation h(t)=0,t<0 and convolution integral is given by y(t)=∫0∞ h(τ)x(t-τ)dτ.
8. Causal systems are ______
a) Anticipative
b) Non anticipative
c) For certain cases anticipative
d) For certain cases anticipative and non anticipative
Answer: b
Explanation: Causal systems are non anticipative. They cannot generate an output before the input is applied. Which indicates the impulse response is zero for negative time.
9. Which of the following is true for discrete-time stable systems?
Answer: a
Explanation: If the condition ∑∞k=-∞|h[k]|<∞ is satisfied by an LTI system then it is said to be stable and for continuous time signal the condition is given by integral
∫∞-∞ |h(τ)|dτ<∞.
10. The impulse response of discrete-time signal is given by h [n] = u [n+3]. Whether the system is causal or not?
a) Causal
b) Non-causal
c) Insufficient information
d) The system cannot be classified
Answer: b
Explanation: The given impulse response h [n] = u [n+3] is not causal because of the term u [n+3] which implies it is non zero for n= -1, -2, -3.
Signals and Systems MCQs – Time Domain Representation for LTI Systems MCQs ( Signals and Systems ) MCQs