Updated Design MCQs ( Control Systems ) MCQs – Most Competitive Control Systems MCQs

Latest Control Systems MCQs
By practicing these MCQs of Design MCQs ( Control Systems ) MCQs – Latest Competitive MCQs , an individual for exams performs better than before. This post comprising of objective questions and answers related to “ Design MCQs ( Control Systems ) Mcqs “. As wise people believe “Perfect Practice make a Man Perfect”. It is therefore practice these mcqs of Control Systems to approach the success. Tab this page to check ” Design MCQs ( Control Systems )” for the preparation of competitive mcqs, FPSC mcqs, PPSC mcqs, SPSC mcqs, KPPSC mcqs, AJKPSC mcqs, BPSC mcqs, NTS mcqs, PTS mcqs, OTS mcqs, Atomic Energy mcqs, Pak Army mcqs, Pak Navy mcqs, CTS mcqs, ETEA mcqs and others.
Control Systems MCQs – Design MCQs ( Control Systems ) MCQs
The most occurred mcqs of Design MCQs ( Control Systems ) in past papers. Past papers of Design MCQs ( Control Systems ) Mcqs. Past papers of Design MCQs ( Control Systems ) Mcqs . Mcqs are the necessary part of any competitive / job related exams. The Mcqs having specific numbers in any written test. It is therefore everyone have to learn / remember the related Design MCQs ( Control Systems ) Mcqs. The Important series of Design MCQs ( Control Systems ) Mcqs are given below:
The Design Problem
1. What should be the nature of bandwidth for a good control system?
a) Large
b) Small
c) Medium
d) All of the mentioned
Answer: a
Explanation: Bandwidth is defined as the difference in the highest frequency and lowest frequency and bandwidth must be large for the good control system and for higher bandwidth noise is also large.
2. Which system exhibits the initiation of corrective action only after the output gets affected?
a) Feed forward
b) Feedback
c) Both a and b
d) None of the mentioned
Answer: b
Explanation: Feedback is the process in which the output of the system is desired by comparing the output with the input and with the feedback system exhibits the initiation of corrective action only after the output gets affected.
3. A good control system should be sensitive to __________
a) Internal disturbances
b) Environmental parameters
c) Parametric variations
d) Input signals (except noise)
Answer: c
Explanation: A good control system is the system with high speed of response and steady state error must be less and bandwidth should be large and noise must be very low and must be sensitive to parametric variations.
4. What is the value of steady state error in closed loop control systems?
a) Zero
b) Unity
c) Infinity
d) Unpredictable
Answer: a
Explanation: Steady state error is the error which is the difference in the final output to the desired output and the value of steady state error for the good control system must be zero.
5. Into which energy signal does the position sensor convert the measured position of servomotor in servomechanisms?
a) Mechanical
b) Electrical
c) Thermal
d) Light
Answer: a
Explanation: In mechanical system the sensors are used in which the mechanical motion is converted into electrical energy and generally in mechanical system position sensor convert the measured position of servomotor in servomechanism.
6. Which among the following controls the speed of D.C. motor?
a) Galvanometer
b) Gauss meter
c) Potentiometer
d) Tachometer
Answer: d
Explanation: D.C. motor is the motor which operates with the direct current as in the construction of DC motors slip rings not commutators and tachometer control the speed of DC motor.
7. Which among the following represents an illustration of closed loop system?
a) Automatic washing machine
b) Automatic electric iron
c) Bread toaster
d) Electric hair drier
Answer: a
Explanation: Closed loop control system is the system with the positive or negative feedback and this is made so as to avoid the disadvantages of open loop control system and in the above options automatic washing machine represents closed loop system.
8. Which notation represents the feedback path in closed loop system representation?
a) b(t)
b) c(t)
c) e(t)
d) r(t)
Answer: c
Explanation: Feedback can be positive and negative and feedback is so used to reduce the error of the system by comparing the final output with the desired output and reducing the error and this error is denoted with the symbol as e(t).
9. Which among the following is not an advantage of an open loop system?
a) Simplicity in construction & design
b) Easy maintenance
c) Rare problems of stability
d) Requirements of system re-calibration from time to time
Answer: d
Explanation: Open loop system is the system with no feedback and the parameter variations in the open loop system are more as compared to the closed loop system and the system has to be re-calibrated as per the requirement as automatic calibration is not present in this system.
10. Which terminology deals with the excitation or stimulus applied to the system from an external source for the generation of an output?
a) Input signal
b) Output signal
c) Error signal
d) Feedback signal
Answer: a
Explanation: For the output of the system, mainly the input and state of the system are required and the excitation or stimulus applied to the system from an external source for the generation of the output is called input signal.
Preliminary Considerations of Classical Design
1. The most important consideration for designing of control system are:
a) Transient response measures
b) Steady state error
c) Temporary response
d) Final response
Answer: c
Explanation: The important point to keep in mind for designing control system are the transient response and steady state response as for designing a control system both of the responses are used in detail. .
2. Steady state error is usually specified in terms of :
a) Error constants
b) Damping factor
c) Speed of response
d) Bandwidth
Answer: a
Explanation: Steady state error is the error that is specified as the time approaches infinite and value approaches the final value and specified mainly in terms of error constants that are mainly position, velocity and acceleration error constants.
3. Transient response measure is usually specified in terms of :
a) Error constants
b) Damping factor
c) Speed of response
d) Both b and c
Answer: d
Explanation: Transient response is the response taken at any particular time during analysis and that is mainly specified in terms of damping factor and speed of response that is mainly settling time and rise time.
4. In time domain the measure of relative stability is:
a) Damping factor
b) Maximum peak overshoot
c) Damping factor and Maximum peak overshoot
d) Speed of response
Answer: c
Explanation: Relative stability is the measure of stability of a particular control system with respect to some reference and is measured both in time and frequency domain as in time domain it is the measure of damping factor and maximum peak overshoot.
5. In frequency domain the measure of relative stability is:
a) Resonant peak
b) Phase margin
c) Resonant peak and phase margin
d) Maximum peak overshoot
Answer: c
Explanation: Relative stability is the measure of stability of a particular control system with respect to some reference and is measured both in time and frequency domain as in frequency domain it is the measure of both resonant peak and phase margin.
6. In time domain the speed of response is measured in terms of :
a) Rise time
b) Settling time
c) Natural frequency
d) All of the mentioned
Answer: d
Explanation: The value of rise time must be less so that the speed of response of control system must be large and it depends upon the rise time, settling time and natural frequency.
7. In frequency domain the speed of response is measured in terms of:
a) Resonant frequency
b) Bandwidth
c) Resonant peak and bandwidth
d) Maximum peak overshoot
Answer: c
Explanation: The speed of response is the time to get the final response and in frequency domain it depends upon the resonant frequency the frequency at which the resonant peak is obtained and bandwidth.
8. The compensator for the system can be:
a) Electrical
b) Mechanical
c) Hydraulic
d) All of the mentioned
Answer: d
Explanation: Compensator can be of any different type but mainly electric network serves as the compensator.
9. The compensator transfer function can be placed in:
a) Cascade or series compensation
b) Feedback or parallel compensation
c) Positive
d) Negative
Answer: c
Explanation: Compensator are the devices used in frequency domain so as to get the desired response and there are various methods to place the compensators in the system as cascade or series or feedback or parallel.
10. Lead compensator speeds up the transient response and increases the margin of stability of a system.
a) True
b) False
Answer: a
Explanation: Derivative compensation are also known as the lead compensators are these make the speed of response of the system more and also the bandwidth and hence make the system more stable.
Realization of Basic Compensators
1. Which of the following is not the correct reason to select feedback compensation over cascaded one?
a) No amplification is required as the energy transfer is from higher to lower level.
b) Suitable devices are not available for compensation(series)
c) It is economical
d) Provides greater stiffness against load disturbances
Answer: c
Explanation: Feedback compensation is the compensation obtained due to feedback and cascade refers to the cascading of blocks in the forward path and feedback compensation is not preferred over cascading as it is economical.
2. Operations performed by pneumatic controllers:
a) Flexible operations
b) High torque high speed operations
c) Fire and explosion proof operation
d) All of the mentioned
Answer: c
Explanation: Pneumatic controllers are the controllers that perform the control action to control the motion related to air and they always perform fire and explosion proof operation.
3. Operations performed by hydraulic controllers:
a) Flexible operations
b) High torque high speed operations
c) Fire and explosion proof operation
d) All of the mentioned
Answer: b
Explanation: Hydraulic controllers are the controllers that perform the control action in which the motion is due to the water and they have high torque and high speed operations.
4. Operations performed by electronic controllers:
a) Flexible operations
b) High torque high speed operations
c) Fire and explosion proof operation
d) All of the mentioned
Answer: a
Explanation: Electronic controllers are the most flexible controller and used over hydraulic and pneumatic controllers and they use the control action where the control is mainly handled by electronic components and can perform flexible operations as of high speed and high torque.
5. The compensator G(s) =5(1+0.3s)/1+0.1s would provide a maximum phase shift of:
a) 20°
b) 30°
c) 45°
d) 60°
Answer: b
Explanation: The two corner frequencies are 1/0.3 and 1/0.1. The maximum phase lead occurs at mid frequency w =10/√ and maximum phase is 30°.
6. Consider the following systems:
System 1: G(s) =1/ (2s+1) and System 2: G(s) =1/ (5s+1)
The true statement regarding the system is:
a) Bandwidth of the system 1 is greater than the bandwidth of the system 2
b) Bandwidth of the system 1 is lower than the bandwidth of the system 2
c) Bandwidth of both the systems are same
d) Bandwidth of both the systems are infinite
Answer: a
Explanation: For the system 1 B.W. is 0.5 and
For the system 2 B.W. is 0.2
Hence the system 1 is having more bandwidth compared to system 2.
7. With regard to the filtering capacity the lead compensator and lag compensator are respectively:
a) Low pass and high pass filter
b) High pass and low pass filter
c) Both high pass filter
d) Both low pass filters
Answer: b
Explanation: Lead compensator is similar to high pass filter which allows only the high frequencies to pass and rejects all the other and Lag compensator is similar to Low pass filter which allows only low frequencies to pass and rejects other.
8. What is the effect of phase lag compensation on the performance of a servo system?
a) For a given relative stability, the velocity constant is increased
b) For a given relative stability, the velocity constant is decreased
c) The bandwidth of the system is increased
d) The time response is made faster
Answer: a
Explanation: Phase lag compensation is an integrator. It reduces the steady state error.
Velocity constant =1/steady state error
So velocity constant is increased.
Frequency Response Analysis MCQs
9. A composite R-C network yielded the following transfer function when calculated from its components:
T(s) = 1+21s+20s2/1+11s+10s2. This network can be used as which one of the following?
a) Phase lead compensator
b) Phase lag compensator
c) Lag lead compensator
d) None of the mentioned
Answer: a
Explanation: T(s) = 1+20s/1+10s.
Since zero is nearer to origin than pole, it is a phase lead compensator.
10. The open loop transfer function of a plant is given as, G(s) =1/s^2-1. If the plant is operated in unity feedback configuration, then the lead compensator that can stabilize the control system is:
a) 10(s-1)/(s+2)
b) 10(s+4)/(s+2)
c) 10(s+2)/(s+10)
d) 10(s+2)/(s+10)
Answer: a
Explanation: G(s) =1/(s-1)(s+1)
The lead compensator C(s) should stabilize the plant as it is similar to the differentiator and the tendency of it is to stablize the system by increasing the damping hence remove the first term so only option (a) satisfies.
Cascade Compensation in Time Domain
1. A proportional controller leads to:
a) Zero steady state error for step input for type 1 system
b) Zero steady state error for step input for type 0 system
c) Infinite steady state error for step input for a type 1 system
d) Finite steady state error for step input for type 1 system
Answer: a
Explanation: A proportional controller is the controller block used in the system so as to follow the output and leads to zero steady state error for step input for type 1 system.
2. An all-pass network imparts only
a) Negative phase to the input
b) Positive phase to the input
c) 90 degree phase shift to the input
d) 180 degree phase shift to the input
Answer: d
Explanation: An all-pass network is the network that is the combination of the minimum and non-minimum phase systems and have the magnitude 1 for all frequencies and imparts only 180 degree phase shift.
3. Which of the following is an effect of lag compensation?
a) Decrease bandwidth
b) Improves transient response
c) Increases the effect of noise
d) Increases stability margin
Answer: a
Explanation: Lag compensation is the integral compensation that introduces the lag in the response by slowing the response and reducing the steady state error value by decreasing bandwidth.
4. PD controller:
a) Decreases steady state error and improves stability
b) Rise time decreases
c) Transient response becomes poorer
d) Increases steady state error
Answer: b
Explanation: In Proportional and Derivative controller the damping factor value is increases the oscillations are reduced and rise time decreases hence speed of response increases.
5. PID controller:
a) Decreases steady state error and improves stability
b) Rise time decreases
c) Transient response becomes poorer
d) Increases steady state error
Answer: a
Explanation: Proportional Integral and Derivative controller is the controller that is the combinational controller that increases the speed of response, decreases steady state error and improves stability.
6. PI controller:
a) Decreases steady state error and improves stability
b) Rise time decreases
c) Transient response becomes poorer
d) Increases steady state error
Answer: c
Explanation: In Proportional and Integral controller which is the extension of the integral controller which improves the steady state response but transient response becomes poorer.
7. Proportional controller
a) Decreases steady state error and improves stability
b) Rise time decreases
c) Transient response becomes poorer
d) Increases steady state error
Answer: d
Explanation: Proportional controller is the controller that is used in the system so that the output follows the input and increases steady state error.
8. PD controller is used to compensate a system, Compared to the uncompensated system, the compensated system has:
a) A higher type number
b) Reduced damping
c) Higher noise amplification
d) Large transient overshoot
Answer: c
Explanation: The compensated system of the proportional derivative controller has bandwidth increases and signal to noise ratio decreases.
9. Lead compensator increases bandwidth
a) True
b) False
Answer: a
Explanation: Lead compensator is similar to high pass filter and causes lead in the system and increases the speed of response of the system and hence increases Bandwidth.
10. Lag compensator reduces__________
a) Position constant
b) Velocity constant
c) Position variable
d) Acceleration constant
Answer: b
Explanation: Lag compensator is the integral compensation that causes the lag in the response and reduces velocity constant.
Cascade Compensation in Frequency Domain
1. A phase lead compensation leads to:
a) Increase in overshoot
b) Reduction in bandwidth of closed loop system
c) Reduction in rise time of closed loop system
d) Reduction in gain margin
Answer: c
Explanation: Phase lead compensation and this is similar to the high pass filter results in increase in bandwidth reduction in settling time and thus, speed of response is improved.
2. PD controller is used to compensate system. Compared to the uncompensated system, the compensated system has:
a) A higher type number
b) Reduced damping
c) Higher noise amplification
d) Large transient overshoot
Answer: c
Explanation: Proportional Derivative controller is used to increase the bandwidth and also increases the signal to noise ratio by reducing the noise and increasing the signal.
3. P+D controller:
a) Introduces offset
b) Increases bandwidth
c) Increases margin of stability
d) Reduces velocity constant
Answer: c
Explanation: Proportional Derivative controller is the controller increases margin of stability and also used to increase he bandwidth and also increases the signal to noise ratio.
4. Proportional controller:
a) Introduces offset
b) Increases bandwidth
c) Increases margin of stability
d) Reduces velocity constant
Answer: a
Explanation: Proportional controller is the controller that is block used to control the gain of the control system and introduces offset error and there is no effect on the damping factor.
5. The transfer function of a lead controller is 1+20s/1+5s. The high frequency magnitude of the lead controller to dB is ___________
a) 1
b) 2
c) 3
d) 4
Answer: d
Explanation: G(s) = Tp (1+Tds)/s^2
It is type-2 function.
The type-2 function has a finite steady state error for unit-parabolic input.
6. Controllers play the following role in control system:
a) They amplify the signals going to the actuator
b) They act on the error signal coming out of the summing junction and output a suitable to the actuator
c) They try to reduce steady state error optimizes overshoot.
d) All of the mentioned
Answer: a
Explanation: Controller amplify the signals going to the actuator and they are of many types as proportional, integral, derivative some combinational controller as combination of two controllers and combination of all the controllers.
7. The transfer function of the compensator is s+4/s+16. The maximum phase lead frequency and the corresponding phase is :
a) 6 rad/sec, 36.87°
b) 8 rad/sec, 36.87°
c) 6 rad/sec, -36.87°
d) 8 rad/sec, -36.87°
Answer: b
Explanation: Phase lead frequency is calculated when magnitude of transfer function is 1 and this is the phase cross over frequency and the phase is calculated by using the tanget formula with the transfer function.
8. Response to error is very fast for integral controller.
a) True
b) False
Answer: b
Explanation: Integral controller is used to reduce or eliminate the error of the control system and for derivative controller the damping factor is increased and speed of response also increases.
9. Consider the following statements:
1. Integral controller improves steady state response
2. By use of proportional controller, maximum peak overshoot decreases
3. Type and order of system reduces by one for derivative controller
4. Integral controller makes the system less stable in transient state due to oscillations
Select the correct answer using the codes given below:
a) 1,3 and 4
b) 1,2 and 3
c) 2.3 and 4
d) 1,2 and 4
Answer: a
Explanation: Integral controller improves steady state response and derivative controller improves the transient response, type and order of system reduces by one for derivative controller.
10. Rate mode controller is also known as ______________ controller mode.
a) Anticpatory
b) Delay
c) Integral
d) Derivative
Answer: a
Explanation: Anticipatory controller mode is also known as the rate mode controller that is used to anticipate the future value with the use of the state.
Tuning of PID Controllers
1. The input of a controller is
a) Sensed signal
b) Error signal
c) Desired variable value
d) Signal of fixed amplitude not dependent on desired variable value
Answer: b
Explanation: Controller is the block in the control system that control the input and provides the output and this is the first block of the system having the input as the error signal.
2. Phase lag controller:
a) Improvement in transient response
b) Reduction in steady state error
c) Reduction is settling time
d) Increase in damping constant
Answer: b
Explanation: Phase lag controller is the integral controller that creates the phase lag and does not affect the value of the damping factor and that tries to reduce the steady state error.
3. Addition of zero at origin:
a) Improvement in transient response
b) Reduction in steady state error
c) Reduction is settling time
d) Increase in damping constant
Answer: a
Explanation: Stability of the system can be determined by various factors and for a good control system the stability of the system must be more and this can be increased by adding zero to the system and improves the transient response.
4. Derivative output compensation:
a) Improvement in transient response
b) Reduction in steady state error
c) Reduction is settling time
d) Increase in damping constant
Answer: c
Explanation: Derivative controller is the controller that is also like high pass filter and is also phase lead controller and it is used to increase the speed of response of the system by increasing the damping coefficient.
5. Derivative error compensation:
a) Improvement in transient response
b) Reduction in steady state error
c) Reduction is settling time
d) Increase in damping constant
Answer: d
Explanation: Damping constant reduces the gain, as it is inversely proportional to the gain and as increasing the damping gain reduces and hence the speed of response and bandwidth are both increased.
6. Lag compensation leads to:
a) Increases bandwidth
b) Attenuation
c) Increases damping factor
d) Second order
Answer: b
Explanation: Phase compensation can be lead, lag or lead lag compensation and integral compensation is also known as lag compensation and leads to attenuation which has least effect on the speed but the accuracy is increased.
7. Lead compensation leads to:
a) Increases bandwidth
b) Attenuation
c) Increases damping factor
d) Second order
Answer: a
Explanation: High pass filter is similar to the phase lead compensation and leads to increase in bandwidth and also increase in speed of response.
8. Lag-lead compensation is a:
a) Increases bandwidth
b) Attenuation
c) Increases damping factor
d) Second order
Answer: d
Explanation: Lag-Lead compensation is a second order control system which has lead and lag compensation both and thus has combined effect of both lead and lag compensation this is obtained by the differential equation.
9. Rate compensation :
a) Increases bandwidth
b) Attenuation
c) Increases damping factor
d) Second order
Answer: c
Explanation: Damping factor is increased for reducing the oscillations and increasing the stability and speed of response which are the essential requirements of the control system and damping factor is increased by the rate compensation.
10. Negative exponential term in the equation of the transfer function causes the transportation lag.
a) True
b) False
Answer: a
Explanation: Transportation lag is the lag that is generally neglected in systems but for the accurate measurements the delay caused to transport the input from one end to the other is called the transportation lag in the system causes instability to the system.
Feedback Compensation
1. Which of the following are the not characteristics of the closed loop systems?
a) It does not compensate for disturbance
b) It reduces the sensitivity of plant-parameter variations
c) It does not involve output measurements
d) It does not has the ability to control the system transient response
Answer: d
Explanation: Feedback refers to the comparison of the final output to the desired output at respective input so as to get accurate and error free result and in the system improves the transient response of the system.
2. Which one of the following effect in the system is not caused by negative feedback?
a) Reduction in gain
b) Increased in bandwidth
c) Increase in distortion
d) Reduction in output impedance
Answer: c
Explanation: Distortion refers to the error in the open loop system and it has many oscillations in the output and is reduced in case of negative feedback.
3. Which of the statement is correct with regard to the bandwidth of the control loop system:
a) In systems where the low frequency magnitude in 0 dB on the bode diagram, the bandwidth is measured at the -3 dB frequency
b) The bandwidth is the measurement of the accuracy of the closed loop system
c) The stability is proportional to the bandwidth
d) The system with larger bandwidth provides slower step response and lower fidelity ramp response
Answer: a
Explanation: Bandwidth is the frequency measured at the gain of 3dB and for the good control system the value of the bandwidth must be large but the large value of the bandwidth increses the noise in the system.
4. Which of the statements are the advantages of closed loop systems over the open loop system:
a) The overall reliability of the open loop system is more than the closed loop system is more than closed loop system.
b) The transient response in closed loop system decays more quickly than in open loop system.
c) In open loop system closing the loop increases the gain of the system
d) In open loop system the effect of parameter variation is reduced
Answer: b
Explanation: Speed of response refers to the time taken to give the final output and it depends upon the rise and settling time of the transient response and speed of response of closed loop system is more than that of open loop system.
5. In control system excessive bandwidth is not employed because
a) Noise is proportional to bandwidth
b) It leads to low relative stability
c) It leads to slower time response
d) Noise is proportional to the square of the bandwidth
Answer: a
Explanation: In closed loop system the bandwidth of the system is more as compared to the open loop system and this is so required as higher the bandwidth means lower the selectivity and hence higher the noise.
6. Feedback control system is basically
a) High pass filter
b) Low pass filter
c) Band pass filter
d) Band stop filter
Answer: b
Explanation: Low pass filter is mainly as integral controller and it is used as the controller in the system so as to increase the accuracy by reducing or proper eliminating the steady state error of the control system.
7. Which of the following will not decrease as a result of introduction of negative feedback?
a) Instability
b) Bandwidth
c) Overall gain
d) Distortion
Answer: b
Explanation: Bandwidth always increases due to negative feedback as the speed of response is directly proportional to the bandwidth.
8. As compared to the closed loop system, an open loop system is
a) More stable but less accurate
b) Less stable as well as less accurate
c) More stable as well as more accurate
d) Less stable but more accurate
Answer: a
Explanation: Open loop system always follows the input but closed loop system always reduces the error irrespective of the input applied.
9. Insertion of negative feedback in control system affects:
a) The transient response to vanish uniformly
b) The transient response to decay very fast
c) No change in transient response
d) The transient response decays at slow rate
Answer: b
Explanation: Feedback can be positive or negative but practically positive feedback is not used as it causes oscillations in the system with more gain and hence negative feedback is use which causes speed of response to increase.
10. Open loop system is ___________ stable than closed loop system
a) More
b) Less
c) Inclined
d) Exponential
Answer: a
Explanation: Open loop system always follows the input but closed loop system always reduces the error irrespective of the input applied.
11. For the gain feedback system, does not affect the system output if KG is :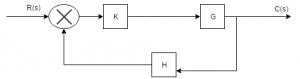
a) Small
b) Negative
c) One
d) Very large
Answer: d
Explanation: T(s)=KG/(1+KGH)
If KG>>1: then C(s)=R(s)/H.
12. Determine the sensitivity of the overall transfer function for the system shown in the figure below, at w=1 rad/sec with respect to the feedback path transfer function.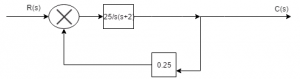
a) 1.11
b) -1.11
c) 2.22
d) -2.22
Answer: b
Explanation: S= -G(s)H(s)/1+G(s)H(s)-1.1.
13. Primary purpose of using Feedback is :
a) To reduce the sensitivity of the system to parameter variations.
b) To increase the bandwidth of the system
c) To reduce the noise and distortion of the system
d) To increase stability of the system
Answer: a
Explanation: The major requirement of the feedback is to reduce of the system with parameter variations that may vary with age, with changing environment.